存储层设计Graph
摘要Graph
NebulaGraph 的 Storage 包含两个部分, 一是 meta 相关的存储, 称之为 Meta Service ,另一个是 data 相关的存储, 称之为 Storage Service。 这两个服务是两个独立的进程,数据也完全隔离,当然部署也是分别部署, 不过两者整体架构相差不大。 如果没有特殊说明,本文中 Storage Service 代指 data 的存储服务。
架构Graph
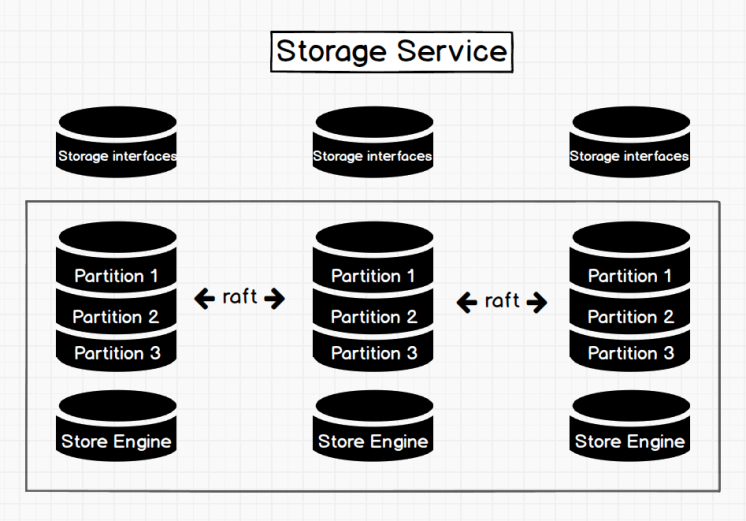
图一 storage service 架构图
如图1 所示,Storage Service 共有三层,最底层是 Store Engine,它是一个单机版 local store engine,提供了对本地数据的 get / put / scan / delete 操作,相关的接口放在 KVStore/KVEngine.h 文件里面,用户完全可以根据自己的需求定制开发相关 local store plugin,目前 NebulaGraph 提供了基于 RocksDB 实现的 Store Engine。
在 local store engine 之上,便是 Consensus 层,实现了 Multi Group Raft,每一个 Partition 都对应了一组 Raft Group,这里的 Partition 便是数据分片。目前 NebulaGraph 的分片策略采用了 静态 Hash 的方式。用户在创建 SPACE 时需指定 Partition 数,Partition 数量一旦设置便不可更改,一般来讲,Partition 数目要能满足业务将来的扩容需求。
在 Consensus 层上面也就是 Storage Service 的最上层,便是 Storage interfaces,这一层定义了一系列和图相关的 API。 这些 API 请求会在这一层被翻译成一组针对相应 Partition 的 kv 操作。正是这一层的存在,使得存储服务变成了真正的图存储,否则,Storage Service 只是一个 kv 存储。而 NebulaGraph 没把 kv 作为一个服务单独提出,其最主要的原因便是图查询过程中会涉及到大量计算,这些计算往往需要使用图的 schema,而 kv 层是没有数据 schema 概念,这样设计会比较容易实现计算下推。
Schema & PartitionGraph
数据结构上,图的主要数据是点和边。但 NebulaGraph 存储的是属性图:除了点和边以外,还存储了对应的属性,以便更高效地使用属性过滤。
对于点来说,NebulaGraph 使用不同的 Tag 表示不同类型的点,同一个 VertexID 可以关联多个 Tag,而每一个 Tag 都有自己对应的属性。对应到 kv 存储里面,NebulaGraph 使用 vertexID + TagID 来表示 key, 把相关的属性编码后放在 value 里面,具体 key 的 format 如图2 所示:

图二 Vertex Key Format
Type: 1 个字节,用来表示 key 类型,当前的类型有 data, index, system 等Part ID: 3 个字节,用来表示数据分片 Partition,此字段主要用于 Partition 重新分布 (balance) 时方便根据前缀扫描整个 Partition 数据Vertex ID: 8 个字节,用来表示点的 IDTag ID: 4 个字节, 用来表示关联的某个 tagTimestamp: 8 个字节,对用户不可见,未来实现分布式事务 (MVCC) 时使用
在一个图中,每一条逻辑意义上的边,在 Nebula Graph 中会建模成两个独立的 key-value,分别称为 out-key 和 in-key。out-key 与这条边所对应的起点存储在同一个 partition 上,in-key 与这条边所对应的终点存储在同一个partition 上。通常来说,out-key 和 in-key 会分布在两个不同的 Partition 中。
两个点之间可能存在多种类型的边,NebulaGraph 用 Edge Type 来表示边类型。而同一类型的边可能存在多条,比如,定义一个 edge type "转账",用户 A 可能多次转账给 B, 所以 NebulaGraph 又增加了一个 Rank 字段来做区分,表示 A 到 B 之间多次转账记录。 Edge key 的 format 如图 3 所示:

图三 Edge Key Format
Type:1 个字节,用来表示 key 的类型,当前的类型有 data, index, system 等。Part ID:3 个字节,用来表示数据分片 Partition,此字段主要用于 Partition 重新分布 (balance) 时方便根据前缀扫描整个 Partition 数据Vertex ID:8 个字节,出边里面用来表示源点的 ID, 入边里面表示目标点的 ID。Edge Type:4 个字节,用来表示这条边的类型,如果大于 0 表示出边,小于 0 表示入边。Rank:8 个字节,用来处理同一种类型的边存在多条的情况。用户可以根据自己的需求进行设置,这个字段可存放交易时间、交易流水号、或某个排序Vertex ID:8 个字节,出边里面用来表示目标点的 ID, 入边里面表示源点的 ID。Timestamp:8 个字节,对用户不可见,未来实现分布式做事务的时候使用。
针对 Edge Type 的值,若如果大于 0 表示出边,则对应的 edge key format 如图4 所示;若 Edge Type 的值小于 0,则对应的 edge key format 如图5 所示

图4 出边的 Key Format

图5 入边的 Key Format
对于点或边的属性信息,有对应的一组 kv pairs,NebulaGraph 将它们编码后存在对应的 value 里。由于 NebulaGraph 使用强类型 schema,所以在解码之前,需要先去 Meta Service 中取具体的 schema 信息。另外,为了支持在线变更 schema,在编码属性时,会加入对应的 schema 版本信息。
数据的分片方式为对 Vertex ID 取模 。通过对 Vertex ID 取模,同一个点的所有出边,入边以及这个点上所有关联的 Tag 信息都会被分到同一个 Partition,这种方式大大地提升了查询效率。对于在线图查询来讲,最常见的操作便是从一个点开始向外 BFS(广度优先)拓展,于是拿一个点的出边或者入边是最基本的操作,而这个操作的性能也决定了整个遍历的性能。BFS 中可能会出现按照某些属性进行剪枝的情况,NebulaGraph 通过将属性与点边存在一起,来保证整个操作的高效。在实际的场景中,大部分情况都是属性图,并且实际中的 BFS 也需要进行大量的剪枝操作。
KVStoreGraph
对于KVStore的要求:
- 性能;
- 以 library 的形式提供:对于强 schema 的 NebulaGraph 来讲,计算下推需要 schema 信息,而计算下推实现的好坏,是 NebulaGraph 是否高效的关键;
- 数据强一致:这是分布式系统决定的;
- 使用 C++实现:这由团队的技术特点决定;
基于上述要求,NebulaGraph 实现了自己的 KVStore。当然,对于性能完全不敏感且不太希望搬迁数据的用户来说,NebulaGraph 也提供了整个 KVStore 层的 plugin,直接将 Storage Service 搭建在第三方的 KVStore 上面,目前官方提供的是 HBase 的 plugin。
NebulaGraph KVStore 主要采用 RocksDB 作为本地的存储引擎,对于多硬盘机器,为了充分利用多硬盘的并发能力,NebulaGraph 支持自己管理多块盘,用户只需配置多个不同的数据目录即可。
分布式 KVStore 的管理由 Meta Service 来统一调度,它记录了所有 Partition 的分布情况,以及当前机器的状态,当用户增减机器时,只需要通过 console 输入相应的指令,Meta Service 便能够生成整个 balance plan 并执行。(之所以没有采用完全自动 balance 的方式,主要是为了减少数据搬迁对于线上服务的影响,balance 的时机由用户自己控制,通常会在业务低谷进行。)
为了方便对于 WAL 进行定制,NebulaGraph KVStore 实现了自己的 WAL 模块,每个 partition 都有自己的 WAL,这样在追数据时,不需要进行 wal split 操作, 更加高效。 另外,为了实现一些特殊的操作,专门定义了 Command Log 这个类别,这些 log 只为了使用 Raft 来通知所有 replica 执行某一个特定操作,并没有真正的数据。除了 Command Log 外,NebulaGraph 还提供了一类日志来实现针对某个 Partition 的 atomic operation,例如 CAS,read-modify-write, 它充分利用了Raft 串行的特性。
关于多图空间(space)的支持:一个 NebulaGraph KVStore 集群可以支持多个 space,每个 space 可设置自己的 partition 数和 replica 数。不同 space 在物理上是完全隔离的,而且在同一个集群上的不同 space 可支持不同的 store engine 及分片策略。
RaftGraph
作为一个分布式系统,KVStore 的 replication、scale out 等功能需 Raft 的支持。主要介绍 NebulaGraph Raft 的一些特点以及工程实现。
Multi Raft GroupGraph
由于 Raft 的日志不允许空洞,几乎所有的实现都会采用 Multi Raft Group 来缓解这个问题,因此 partition 的数目几乎决定了整个 Raft Group 的性能。但这也并不是说 Partition 的数目越多越好:每一个 Raft Group 内部都要存储一系列的状态信息,并且每一个 Raft Group 有自己的 WAL 文件,因此 Partition 数目太多会增加开销。此外,当 Partition 太多时, 如果负载没有足够高,batch 操作是没有意义的。比如,对于一个有 1万 TPS 的线上系统,即使它的每台机器上 partition 的数目超过 1万,但很有可能每个 partition TPS 只有 1,这样 batch 操作就失去了意义,还增加了 CPU 开销。
实现 Multi Raft Group 的最关键之处有两点,第一是共享 Transport 层,因为每一个 Raft Group 内部都需要向对应的 peer 发送消息,如果不能共享 Transport 层,连接的开销巨大;第二是线程模型,Multi Raft Group 一定要共享一组线程池,否则会造成系统的线程数目过多,导致大量的 context switch 开销。
BatchGraph
对于每个 Partition来说,由于串行写 WAL,为了提高吞吐,做 batch 是十分必要的。NebulaGraph 利用每个 part 串行的特点,做了一些特殊类型的 WAL,带来了一些工程上的挑战。
举个例子,NebulaGraph 利用 WAL 实现了无锁的 CAS 操作,而每个 CAS 操作需要之前的 WAL 全部 commit 之后才能执行,所以对于一个 batch,如果中间夹杂了几条 CAS 类型的 WAL, 还需要把这个 batch 分成粒度更小的几个 group,group 之间保证串行。还有,command 类型的 WAL 需要它后面的 WAL 在其 commit 之后才能执行,所以整个 batch 划分 group 的操作工程实现上比较有特色。
LearnerGraph
Learner 这个角色的存在主要是为了 应对扩容 时,新机器需要“追”相当长一段时间的数据,而这段时间有可能会发生意外。如果直接以 follower 的身份开始追数据,就会使得整个集群的 HA 能力下降。 NebulaGraph 里面 learner 的实现就是采用了上面提到的 command wal。 Leader 在写 wal 时如果碰到 add learner 的 command, 就会将 learner 加入自己的 peers,并把它标记为 learner,这样在统计多数派的时候,就不会算上 learner,但是日志还是会照常发送给它们。当然 learner 也不会主动发起选举。
Transfer LeadershipGraph
Transfer leadership 这个操作对于 balance 来讲至关重要,当把某个 Partition 从一台机器挪到另一台机器时,首先便会检查 source 是不是 leader,如果是的话,需要先把他挪到另外的 peer 上面;在搬迁数据完毕之后,通常还要把 leader 进行一次 balance,这样每台机器承担的负载也能保证均衡。
实现 transfer leadership, 需要注意的是 leader 放弃自己的 leadership,和 follower 开始进行 leader election 的时机。对于 leader 来讲,当 transfer leadership command 在 commit 的时候,它放弃 leadership;而对于 follower 来讲,当收到此 command 的时候就要开始进行 leader election, 这套实现要和 Raft 本身的 leader election 走一套路径,否则很容易出现一些难以处理的 corner case。
Membership changeGraph
为了避免脑裂,当一个 Raft Group 的成员发生变化时,需要有一个中间状态, 这个状态下 old group 的多数派与 new group 的多数派总是有 overlap,这样就防止了 old group 或者新 group 单方面做出决定,这就是Graph中提到的 joint consensus 。为了更加简化,Diego Ongaro 在自己的博士论文中提出每次增减一个 peer 的方式,以保证 old group 的多数派总是与 new group 的多数派有 overlap。 NebulaGraph 的实现也采用了这个方式,只不过 add member 与 remove member 的实现有所区别,具体实现方式可以参考 Raft Part class 里面 addPeer/removePeer 的实现。
SnapshotGraph
Snapshot 如何与 Raft 流程结合起来,Graph中并没有细讲,但是这一部分是一个 Raft 实现里最容易出错的地方,因为这里会产生大量的 corner case。
举一个例子,当 leader 发送 snapshot 过程中,如果 leader 发生了变化,该怎么办? 这个时候,有可能 follower 只接到了一半的 snapshot 数据。 所以需要有一个 Partition 数据清理过程,由于多个 Partition 共享一份存储,因此如何清理数据又是一个很麻烦的问题。另外,snapshot 过程中,会产生大量的 IO,为了性能考虑,不希望这个过程与正常的 Raft 共用一个 IO threadPool,并且整个过程中,还需要使用大量的内存,如何优化内存的使用,对于性能十分关键。由于篇幅原因,并不会在本文对这些问题展开讲述,可以参考 SnapshotManager 的实现。
Storage ServiceGraph
在 KVStore 的接口之上,NebulaGraph 封装有图语义接口,主要的接口如下:
getNeighbors:查询一批点的出边或者入边,返回边以及对应的属性,并且需要支持条件过滤;Insert vertex/edge:插入一条点或者边及其属性;getProps:取一个点或者一条边的属性;
这一层会将图语义的接口转化成 kv 操作。为了提高遍历的性能,还要做并发操作。
Meta ServiceGraph
在 KVStore 的接口上,NebulaGraph 也同时封装了一套 meta 相关的接口。Meta Service 不但提供了图 schema 的增删查改的功能,还提供了集群的管理功能以及用户鉴权相关的功能。Meta Service 支持单独部署,也支持使用多副本来保证数据的安全。